
© Greg Letts

From time on the table tennis forums, I have noticed requests for reviews of different table tennis robots. Since I purchased a Butterfly Amicus 3000 Table Tennis robot last year, I thought I’d give a comprehensive review of how useful I’ve found it to be. (Note: The Amicus 3000 has now been replaced by the 3000 PLUS – GL 5/1/2006)
In general, I’ve been pretty happy with it. Although I still haven’t really got into all the advanced features it offers, I’ve managed to get some good training out of just using the basics. I’m sure it would be even better if I took the time to learn how to use all the bells and whistles.
I’ve listed below a number of properties about the Butterfly Amicus 3000, and what I think about them.
Price
First of all, it’s not cheap – over $3000 Australian. The main difference between this and the lower priced Butterfly Amicus 1000 seems to be the programming capabilities, where you can program various sequences of balls with different spins, speeds and placements.
 |
| How do you work this thing? |
As I said, I’ll eventually have to master all the programming in order to get my full value for money out of the robot. Those of you who can’t be bothered to get into anything too complicated might be better off with the simpler Amicus 1000, which can still do the basics without any of the fancy stuff than you might never need.
Setup
Setting it up was pretty easy, the pictures in the manual are quite good and there really isn’t all that many parts to put together, so it’s hard to go wrong. It took me about 15 minutes or so – 10 minutes to carefully read the manual and 5 minutes to actually put it together.
Manual
The manual is OK – good in some places and not so great in others. As I mentioned previously, the setup part is pretty good, while the explanation of how to program the advanced features could use a rewrite by someone with English as their first language! This is the main reason I haven’t used the advanced programming yet – it’s hard to work up the enthusiasm to tackle the manual and try to work out how it works.
Ease of Use
Main Controller
Despite the problems with advanced programming, the Amicus 3000 is actually pretty easy to use. As you can see from the photo, you have 4 balls that can be set quickly and easily using the sliders in the top left to adjust the ball length, the knobs in the bottom left to control the speed and spin, and the sliders on the top right to control the left-right placement. The 4 circular buttons on the bottom left can be used to select how many balls of each type to send out, for example, you could set 3 of Ball A, 2 of Ball B, 4 of Ball C, and 1 of Ball D.
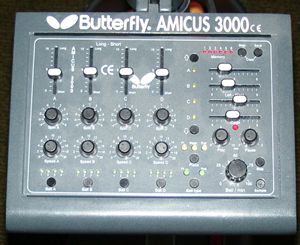 |
| Control Panel |
It’s also possible to set random placements, or random selections of Ball types, just by pressing a few buttons (these are the ‘Place’ and ‘Ball type’ at the bottom middle-right. In fact, this is probably the real reason I don’t use the advanced programming much – I can get just about all I need by setting the Ball A, B, C and D and then choosing the random options to mix things up when I want – it only takes a few seconds.
You’ve also got a controller at the bottom right for adjusting the ball frequency, and Play and Pause knobs just above it, which control how long the machine shoots out balls for, then how long it waits to give you a rest!
Remote Control
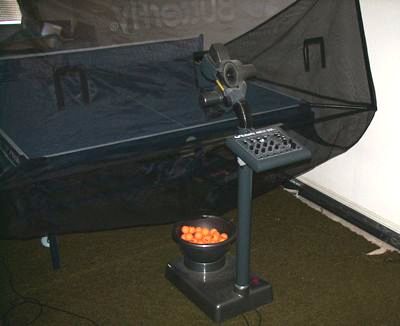
There is also a remote control which can be seen draped over the net in photo at the top of the page, which is used to pause the machine from your side of the table if you need a break. You can also use standard D-15 and D-9 computer cables to place the main controller on your side of the table if you want, although I haven’t bothered to do this.
Ball return and Ball Capacity
 |
| There’s a hole in the bucket, dear Liza, dear Liza … |
The ball return mechanism works by having the nets catch the balls, then run them into the bucket at the base, which has a hole in the bottom where the balls are feed through into the pipe and lifted up to be shot out by the revolving heads at the top. It all works smoothly – I haven’t had a problem yet in over a year of operation.
The ball capacity of the bucket is fine – probably over a couple of hundred balls. I bought a gross (144) balls when I started and there was still plenty of space left in the bucket. When you add in the ball return you won’t have to worry about running out of balls too often!
Mobility
As you can see from the photos, the robot itself is pretty compact. It has rollers under the base, which allow you to roll it forwards and backwards pretty easily. To move it side to side it’s usually easier to grap it along the pipe and lift it – it doesn’t roll sideways at all. The robot is not that heavy though – you could easily use it as a travelling robot and lift it in and out of a car without trouble.
Maintenance
The Amicus 3000 has proven to be trouble free so far – I haven’t had to do any maintenance tasks yet. The manual mentions something about checking the widths of the rollers if you have ball feed problems – but other than that not much is required. I’d better have another check though just in case I’ve missed anything!
Noise
 |
| Go ahead, make my day … |
The robot is not as noisy as I thought it would be – we have a common wall with our neighbour next door and we’ve never had a complaint about using the robot yet! I’m not saying it’s whisper quiet either, but if you have a garage or a room where you can shut the door, you shouldn’t have to worry about bothering anyone else while you practice.
Dual Heads
I’m not going to get into this in great detail – other than to say that by having 2 heads to feed out the balls, Butterfly claims that this completely disassociates the speed from the spin on the ball. I personally wouldn’t say that this is completely true, but it’s as close as you’ll ever need. You can get a fast ball with very little spin, and a slow ball with a lot – what more do you want?
Feeder Height and Placement
The robot placement can be varied as shown in the photos, with holes for placing the robot to the left or right. Bear in mind this means that the ball return won’t work – since the balls wont run into the bucket anymore. You’ll need to put another bucket underneath the hole and manually put them back into the ball return bucket every so often.
The robot height is unadjustable – which is probably the one thing about the Butterfly Amicus 3000 that really cheeses me off. How hard could it be to make an adjustable pipe that allows you to control the height of the feeder? It would really improve the ability of the robot to replicate serves and low loops. I have read that some owners have actually shortened the pipe themselves, but I’m not about to try that myself!
Sidespin
In order to put sidespin on the ball, you need to rotate the ball feeder motors yourself. This will give you sidespin, but unfortunately the sidespin is then on every ball. So if you are planning to use the robot to give you a sidespin serve, then a straight topspin loop – forget it. Short of making a motorised head turner, you can’t expect Butterfly to fix this either.
 |
| You gotta admit, it’s got balls! |
One thing to watch is that when the ball is fired further to the left or right sides of the table, the heads put a little more sidespin on the ball, kicking it back towards the centre of the table. It’s significant but not really much of a problem once you realise what is happening – I hardly even notice it anymore – I’ve just adjusted to it over time. You’ll hit a few on your fingers while you are adjusting though!
Conclusion
All in all, I’m pretty happy with my Amicus 3000 – I’ve gotten good use out of it over the last year or so with no maintenance worries. It’s not perfect, but it’s still a great robot overall. And one day when I finally sit down and get all the advanced programs working it will be even better! Until then, the basic features do it for me just fine.
| Interested in Purchasing a Butterfly Table Tennis Robot? | Buy Online |
